

Attention Turns to Extra Large Unmanned Underwater Vessels

In August, 2021, after years of delays, cost overruns, and rising tensions, the Australian government canceled a A$90 billion order with France’s Naval Group for 12 conventionally powered submarines intended to replace the Royal Australian Navy (RAN)’s aging fleet of six Collins-class attack subs. Overnight, the future of the RAN’s undersea warfare capability was cast into uncertainty. The very next month, however, the United States and the United Kingdom announced a plan to help Australia fill the void…
For the Royal Australian Navy, Technological Leap Starts Small

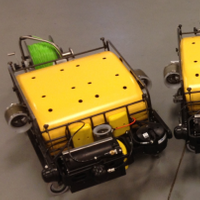
Driven by the need to organically protect maritime Task Groups from the threat of sea mines, the Royal Australian Navy is introducing a deployable Mine Counter-Measures (MCM) capability under the first phase of Project SEA 1778.The Royal Australian Navy’s (RAN) SEA 1778 deployable Mine Counter-Measures (MCM) capability is both a small step forward in the spiral development process and a “technological leap” into autonomy.”The RAN is looking to replace its four legacy Huon-class minehunter coastal ships (MHCs) with a new deployable MCM capability.
General Dynamics AUV Detects Threats to Ship Hulls
General Dynamics Mission Systems featured the Bluefin Robotics hovering-autonomous underwater vehicle (H-AUV) at OCEANS 2016 in Monterey, California. The Bluefin Robotics H-AUV locates, identifies and maps structural issues on a ship’s hull including large ocean going cargo ships, petroleum and chemical tankers, cruise ships and military surface and sub-surface vessels without dry-docking the ship. “Inspecting ship hulls and other underwater surfaces can be a manpower- and cost-intensive part of a ship’s observation and maintenance,” said Matt Graziano, director of Autonomous Undersea Systems for General Dynamics Mission Systems. The Bluefin Robotics H-AUV operates autonomously and navigates along a hull, bridges or piers.
Hull Inspection Systems Delivered to the US Navy
Bluefin Robotics has delivered new vehicles to the U.S. Navy that aim to increase the Navy's capability to remotely search and investigate ship hulls, harbor sea floors and other underwater infrastructure for limpet mines, Improvised Explosive Devices (IEDs) and other objects of interest. The Navy accepted delivery of Bluefin Robotics’ ship hull inspection systems 4 and 5 under the “Explosive Ordnance Disposal, Hull Unmanned Underwater Vehicle Localization System” (EOD HULS) Program of Record, in February.
AUV Helps Locate Sunken Japanese Warship

Bluefin Robotics underwater robot helps locate historic sunken Japanese battleship Musashi; located by philanthropist and entrepreneur Paul G. Bluefin Robotics underwater autonomous vehicles (AUV) scour the ocean floors around the world looking for items critical to the defense industry, oceanographic researchers and the oil and gas industry. Most recently, a Bluefin vehicle was used by Paul G. Allen and his team of researchers in their search for the sunken Japanese battleship Musashi, the largest battleship in naval history.
Robotic Submarine Begins Flight MH370 Search

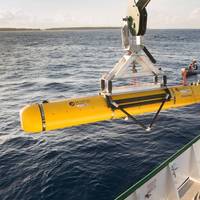
An international search has focused on waters west of the Australian city of Perth, with teams racing against time to detect signals before the flight recorder batteries – which last about one month – run out, are to send down a [Bluefin Robotics manufactured] Bluefin 21 AUV, reports BBC News. Search chief Angus Houston told the BBC that the Bluefin-21 drone would be sent down as soon as possible to search for wreckage on the sea floor. Teams have been using a towed pinger locator to listen for signals from the plane's "black box" flight recorders.
Rear Adm. Byus (Ret.) to Lead Battelle’s Maritime Systems Group

Fred Byus, a U.S. Navy retired Rear Admiral, has been named General Manager of Battelle’s Maritime Systems business unit. Byus joined Battelle in December 2007 as Vice President of National Security’s Navy Market Group after a distinguished 31-year career in the U.S. Navy. His Navy experience included leadership positions in nuclear engineering, submarines, and command and control of fleet and joint forces. Byus also has served as Oceanographer and Navigator of the Navy, Commander Naval Forces Korea, Commander Submarine Squadron Seven and Commanding Officer of USS Tautog.
Bluefin Acquires SeeByte

Bluefin Robotics, a provider of Autonomous Underwater Vehicles (AUVs), announced that it has acquired SeeByte, Ltd., a provider of autonomous platform software that enhances the user experience and the capabilities of underwater sensors, vehicles and systems. SeeByte, headquartered in Edinburgh, Scotland, will operate as a wholly-owned subsidiary of Bluefin. Terms of the transaction were not disclosed. Bluefin is owned by Battelle, an independent science and technology organization committed to solving some of the world's toughest challenges in national security…
General Dynamics Tests U.S. Navy UUVs
General Dynamics Advanced Information Systems, a business unit of General Dynamics, completed the comprehensive risk reduction program for the U.S. Navy’s Knifefish Surface Mine Countermeasure Unmanned Undersea Vehicle (UUV) program. Designed to discover any potential systems defect early on in the program’s development phase, the configuration item test (CIT) successfully verified key components within the UUV system including the hardware architecture and critical areas of hardware and software integration.
Oceans '13 MTS/IEEE San Diego Preview

Heeding the call to join “An Ocean in Common,” authors flooded the Oceans ‘13 MTS/IEEE San Diego technical program committee with a record number of abstracts in a single day. Special topics include an Ultra-deep track discussing current and prospective robotic technologies, plus a panel of scientists to consider research questions. Oceans2013 Chair Bob Wernli, and Co-Chair Kevin Hardy, developer of the unmanned landers for James Cameron’s DeepSea Challenge Expedition, will be the session conveners. “James’ intention is to be certain the door remains open to other explorers,” Hardy said.
Bluefin Completes DARPA UUV Deep Testing

Bluefin Robotics has successfully completed deep-water testing of a specialized Unmanned Underwater Vehicle (UUV) for the Defense Advanced Research Projects Agency (DARPA). The system was developed under a Phase II subcontract from Applied Physical Sciences Corp. (APS) for the Deep Sea Operations (DSOP) Program. DSOP is part of DARPA's Distributed Agile Submarine Hunting program (DASH), which aims to develop affordable distributed technology to address Anti-Submarine Warfare (ASW) surveillance needs over large, operationally relevant areas.
The Search for Amelia Earhart Continues
Acoustic positioning technology from Sonardyne Inc, Houston, was selected to play a key role in a recent expedition aiming to solve one of the greatest mysteries of the 20th century. A Bluefin Robotics AUV (Autonomous Underwater Vehicle) was equipped with a Sonardyne Ranger 2 underwater target tracking system which was used by The International Group for Historic Aircraft Recovery (TIGHAR) to search for the remains of the Lockhead Electra aircraft flown by Amelia Earhart during her failed circumnavigation attempt in 1937.
Autonomous Robot Maps Ship Hulls for Mines
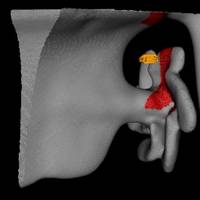
Algorithms enable robot to navigate and view propellers and other complex structures. For years, the U.S. Navy has employed human divers, equipped with sonar cameras, to search for underwater mines attached to ship hulls. The Navy has also trained dolphins and sea lions to search for bombs on and around vessels. While animals can cover a large area in a short amount of time, they are costly to train and care for, and don’t always perform as expected. In the last few years, Navy scientists…
Navy Awards $87m Deal for Mine Countermeasure UUV
The U.S. Navy’s Naval Sea Systems Command has awarded General Dynamics Advanced Informational Systems a contract to design and build the Surface Mine Countermeasure Unmanned Underwater Vehicle (SMCM UUV) system. The system will initially be a part of the Littoral Combat Ship Mine Warfare mission package. The contract has a maximum potential value of $86.7 million for one Engineering Development Model (EDM) and five low-rate initial production systems if all options are exercised. General Dynamics Advanced Informational Systems is a business unit of General Dynamics (NYSE: GD). The SMCM UUV system will allow Navy commanders and sailors to reliably detect and identify mines in high-clutter underwater environments in a single pass…
Bluefin Wins BPAUV Contract
Autonomous Undersea Vehicle (BPAUV) design and development. Littoral Combat Ship Mine Warfare Mission Module. surveillance, reconnaissance, and survey requirements. Cambridge, Mass., and is expected to be completed by December 2006. will not expire at the end of the current fiscal year. competitively procured. contracting activity (N00024-05-C-6316).
Clamp Supplier Dives into Project
Bluefin Robotics Corp. called on Clampco — a manufacturer of stainless steel T-bolt band clamps and V-band couplings — when it needed help "testing the waters." Bluefin specializes in manufacturing underwater robotic equipment for offshore survey, military, and scientific research customers. By working with Clampco Products Inc., Bluefin was able to complete an underwater robotics project for the U.S. Navy in record time. Bluefin designed, built, tested, and demonstrated its AUV (Autonomous Underwater Vehicle) for the Coastal System Station and the Office of Naval Research in approximately eight months — half the time typically required for projects of a similar scale. Sam Tolkoff, engineer at Bluefin, attributes this rapid development to one of its suppliers, Clampco Products, Inc.


