Tech Talk: GHS Adds 'Seakeeping'




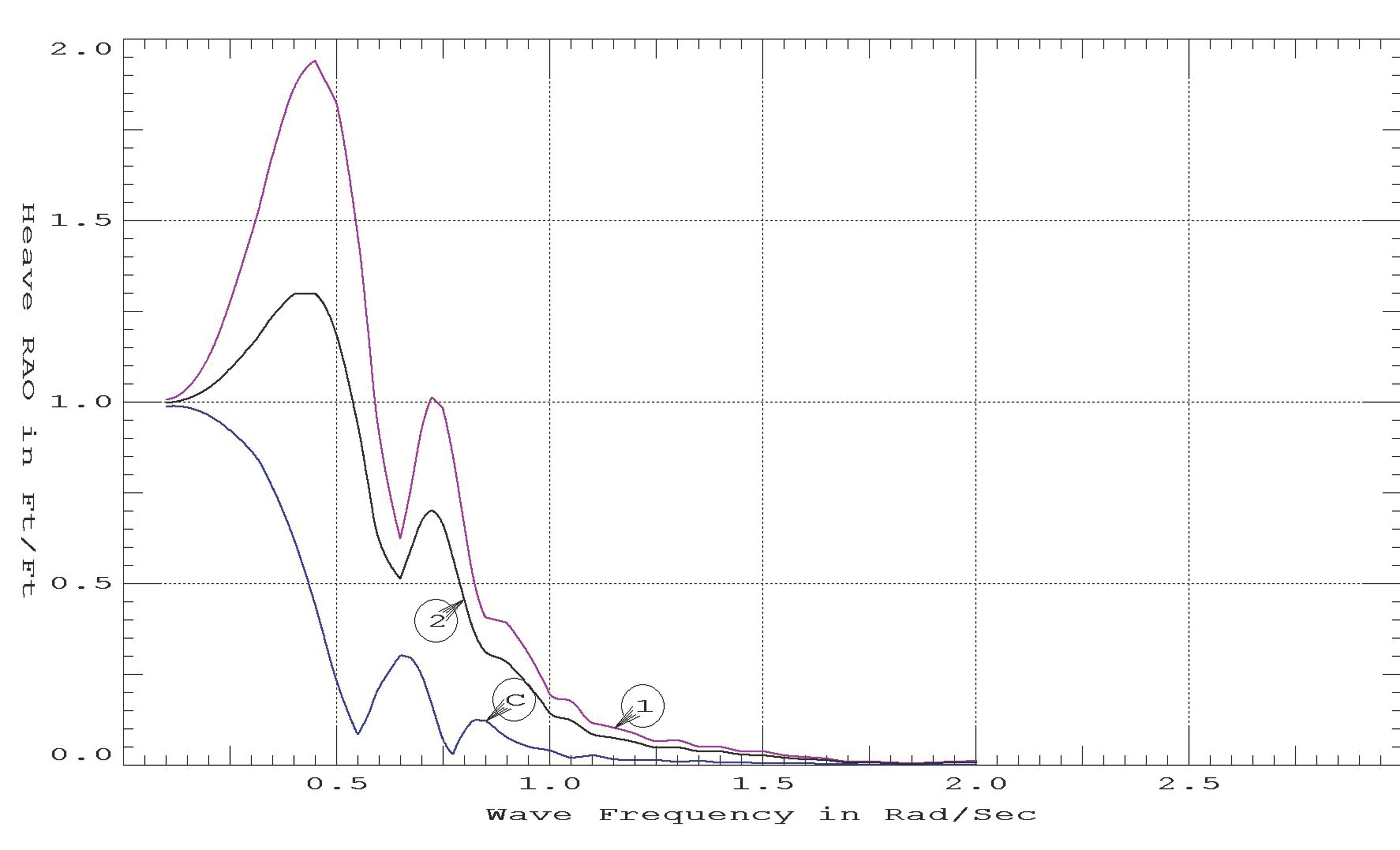
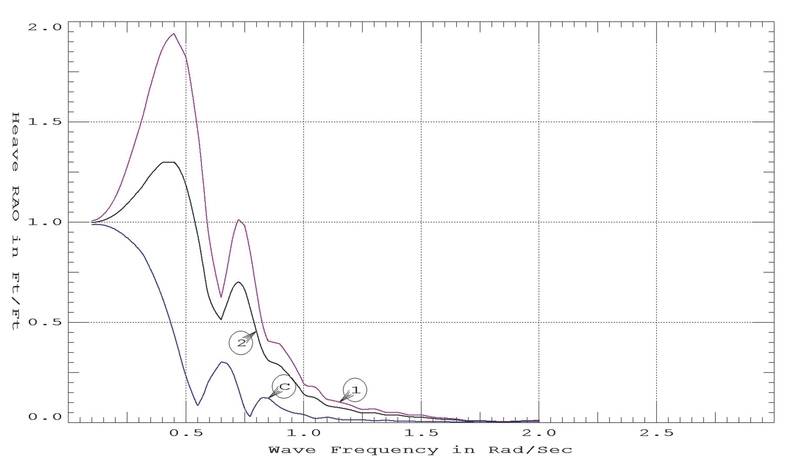 KRISO Containership CG and Critical Point Heave RAOs in head seas and zero speed as taken from the SeaKeeping report. (Image: GHS)
KRISO Containership CG and Critical Point Heave RAOs in head seas and zero speed as taken from the SeaKeeping report. (Image: GHS)
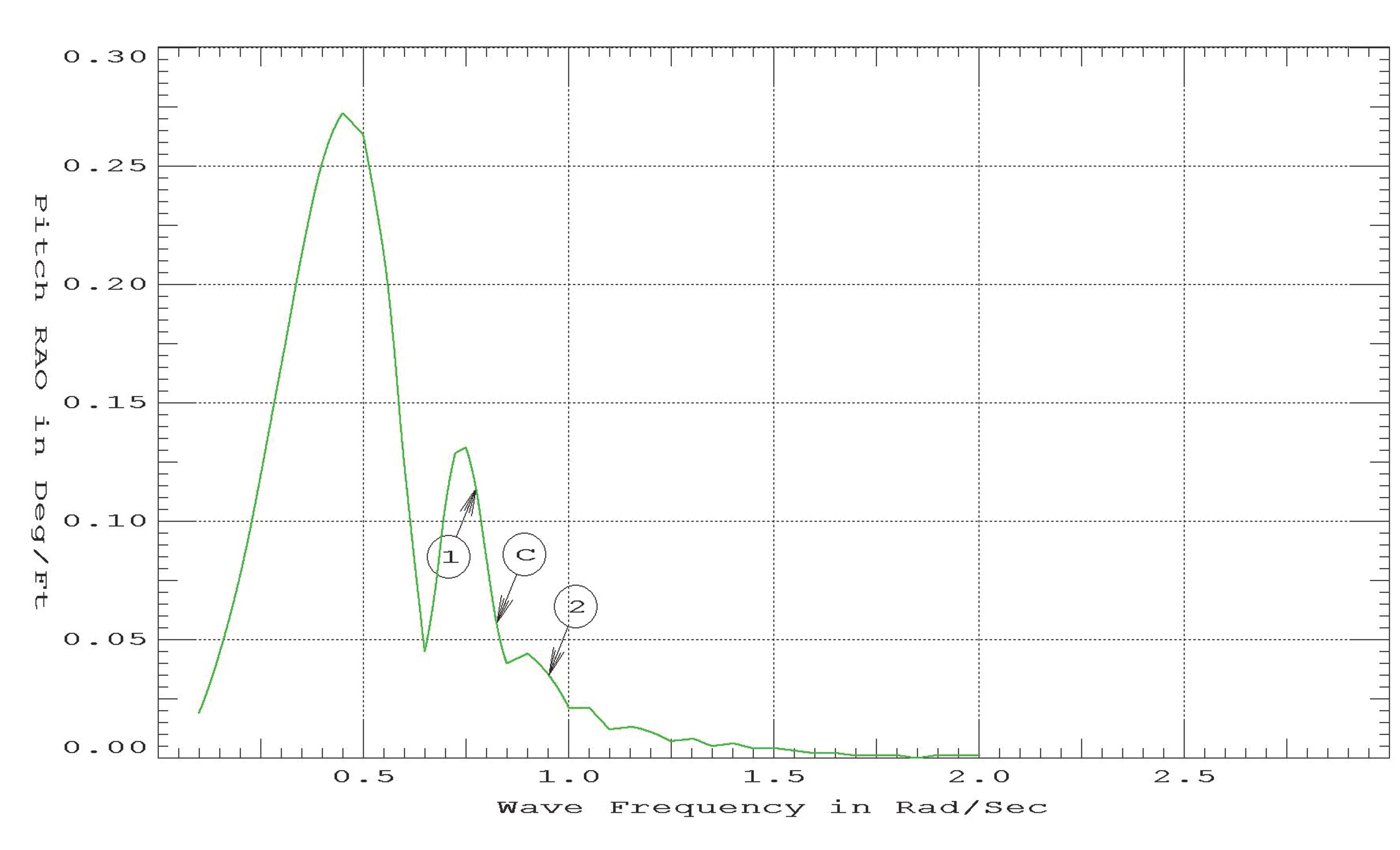
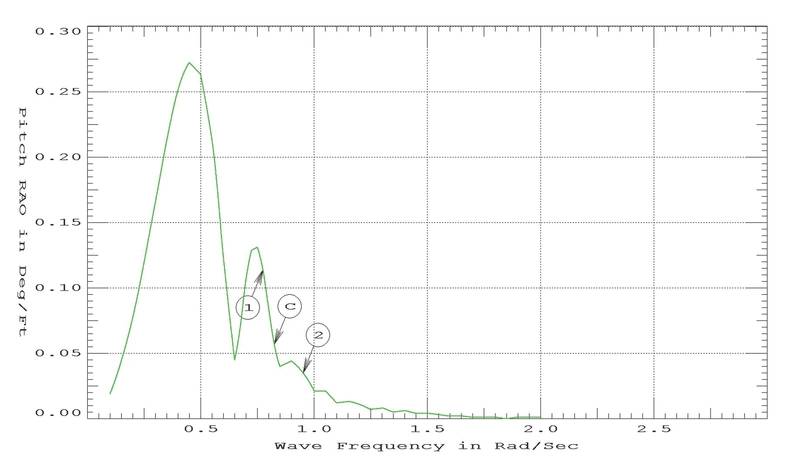 KRISO Containership CG and Critical Point Pitch RAOs in head seas and zero speed as taken from the SeaKeeping report. (Image: GHS)
KRISO Containership CG and Critical Point Pitch RAOs in head seas and zero speed as taken from the SeaKeeping report. (Image: GHS)
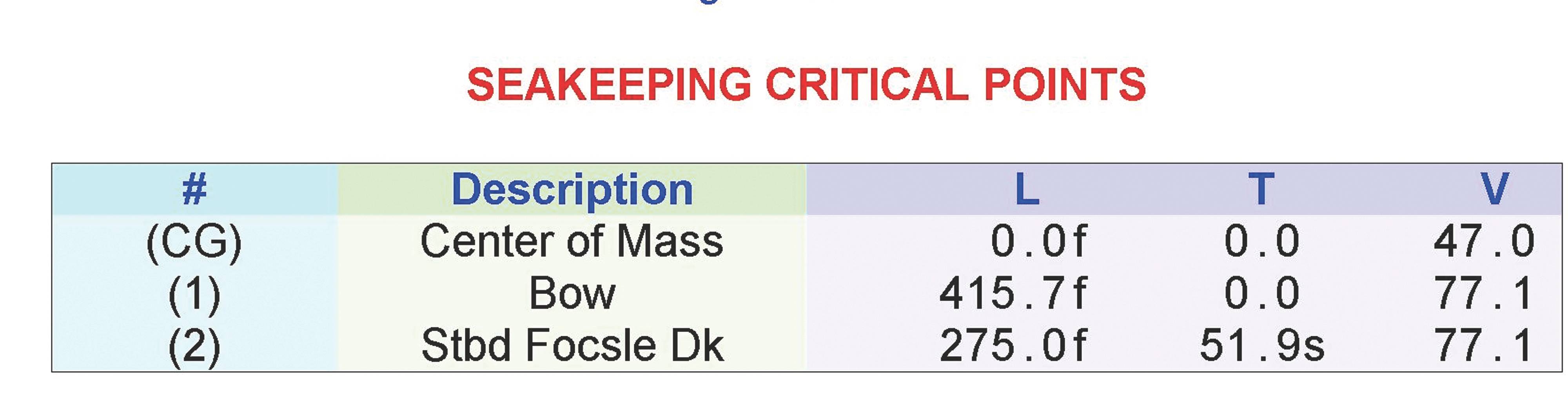
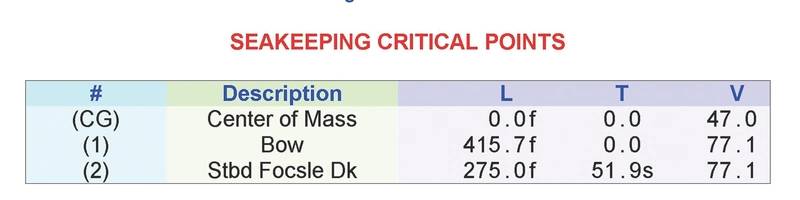 The SeaKeeping report summarizes all critical points for easy reference. (Image: GHS)
The SeaKeeping report summarizes all critical points for easy reference. (Image: GHS)
General HydroStatics is no longer just about hydrostatics, and will soon offer capabilities in the world of hydrodynamics with the introduction of a long awaited addition to the GHS product family: an optional seakeeping module.
Adding a seakeeping module means run files may now include seakeeping capabilities by adding a couple new commands and existing geometry files (.GF) can be used for the seakeeping analysis with little or no modification. Integration with GHS also reduces required user input, getting answers faster while increasing user control.
GHS already offers users a complete package when it comes to stability and longitudinal strength. In addition, GHS offers advanced capabilities for complex loading conditions, crane operations, and salvage operations. The onboard configuration of GHS, or General HydroStatics Load Monitor, “GLM” offers users the functionality to configure highly-capable onboard loading computers based on the proven GHS calculation engine. The new GHS SeaKeeping “SK” module builds upon this existing foundation to give users even more functionality, all while staying within the GHS framework.
Before GHS SeaKeeping, when GHS users needed to perform a motions analysis for their designs, it was necessary to use the built-in GHS conversion tools to prepare their geometry for third-party software tools. The loading condition would then need to be manually re-created in the third-party software using output from GHS. In many cases, theoretical limitations in other software programs meant a direct re-creation of the loading condition was impossible, as hydrostatic information could not be directly accessed or used, so further simplifications had to be made.
By contrast, much of the information that other seakeeping codes require as input is accessed in a direct manner “behind-the-scenes” by the native GHS SeaKeeping module. This means SeaKeeping will run on the specific loading condition, and all added weights, tank loads, and their respective locations are included in the formulation. By keeping the seakeeping analysis within GHS, the number of input parameters is dramatically reduced, geometry conversion issues are virtually eliminated, the overall complexity of an analysis is reduced, and accuracy is improved. All of these factors translate into reductions in the time users will spend running quality seakeeping calculations, offering users unmatched ease of use.
The release version of the GHS SeaKeeping module is based upon a linear, 6-DOF, rigid-body, frequency-domain, strip-theory method with variable heading and forward speed terms. Although other methods exist, each with their respective merits, strip-theory was chosen because it is well-established, well-tested, and generally well-understood. The method is also more robust than other available methods, is well suited to the section-based GHS geometry format, and is computationally efficient. The 2D hydrodynamic problem is solved using a cutting-edge, in-house boundary element method algorithm, which avoids the geometric pitfalls of conformal mapping while improving upon the computational limitations of classical panel methods. While the method offers excellent capability for a wide range of applications, it is important for users to understand and be aware of the theoretical foundation behind the analysis.
Users will be able to compute such information as absolute and relative displacements, velocities, accelerations, and RAOs at the vessel center of gravity or at any other designated point. Crane booms, control stations, and other motion-critical locations on the vessel may be designated using GHS critical points in exactly the same way one would specify critical points for a stability analysis. The user simply has to indicate which points should be included in the seakeeping calculations. SeaKeeping will then compute the motions at these points and automatically create a report, including RAO plots, which clearly show the 6-DOF motion response. For each point, statistical response data including response variance, average and significant response amplitudes, average periods, and extreme maxima are also provided.
GHS SeaKeeping is designed to allow users to compute motions in regular or irregular long-crested waves via an extension to the existing WAVE command. A seaway may be specified using the built-in wave spectra forms, which include Pierson-Moskowitz, Bretschneider (General, Narrow-band, and ITTC 1984), general JONSWAP, and ITTC 1978 JONSWAP. Users may otherwise opt to use an external data file when site-specific information is available. A custom, parameterized sampling algorithm was designed to give reliable and accurate discrete representations of wave spectra. A summary table and plot of the continuous and sampled spectrum are automatically included in the seakeeping report for review.
For data-centric users, GHS SeaKeeping offers optional output data files that include such information as the hydrodynamic and hydrostatic coefficients, and inertial, diffraction, and total forcing amplitudes and phase angles. Users can easily access this information for verification, validation, or post-processing as needed.
The addition of SeaKeeping to the GHS product family ushers in a new option for powerful, integrated, and user-friendly seakeeping calculations.
The Author
Kyle Marlantes is a Naval Architect/Software Developer with Creative Systems, Inc. He holds a Bachelor of Science in NAME from the University of New Orleans.
(As published in the January 2018 edition of Maritime Reporter & Engineering News)